Durch den Betrieb der speziell gekennzeichneten Testfahrzeuge im öffentlichen Straßenverkehr, sowie auf landwirtschaftlichen und gewerblichen Betrieben, werden personenbezogene Daten erhoben und wie im Folgenden beschrieben verarbeitet.
Wir verbauen verschiedene Sensoren, wie GNSS-/Ortungssensoren, Radar- und Ultraschallsensoren, etc. als auch Videokameras, Mikrofone, Messtechnik, etc. in unterschiedlichen Konfigurationen an den Testfahrzeugen. Das Umfeld der Fahrzeuge im landwirtschaftlichen und gewerblichen Einsatz, als auch im öffentlichen Straßenverkehr wird aufgezeichnet und in Audio- und Videodateien gespeichert und bei Bedarf mit Daten von weiteren Sensoren ergänzt und/oder zusammengeführt.
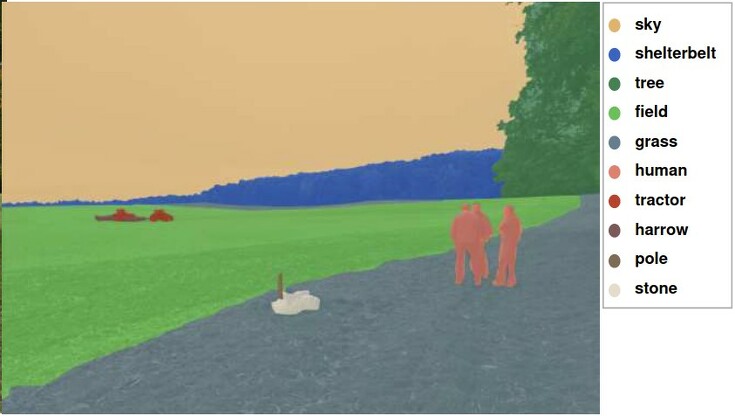
Videoaufzeichnungen werden genutzt, um Modelle der zu bearbeitenden und zu befahrenden Umgebung sowie statische und dynamische Verkehrsobjekte zu erstellen. Beispielsweise handelt es sich dabei um Hindernisse, besondere geologische Formationen, Straßenmarkierungen, LKW, Autos, Motorräder, Fahrräder, etc. und den dazugehörigen Positionen und Bewegungsprofilen relativ zum Testfahrzeug. Eventuell werden auch Bewegungsabläufe von Fußgängern und Passanten analysiert, um deren Bewegungsrichtung zu berechnen oder vorherzusagen.
Aufzeichnung von Umgebungsgeräuschen und deren Speicherung in Audiodateien werden genutzt, um z.B. spezielle (Gefahren-)Situationen, wie beispielsweise durch Martinshorn begleitete Einsatzfahrten von Rettungskräften zur erkennen und entsprechende Maßnahmen einzuleiten. Damit diverse Abläufe bei landwirtschaftlichen und gewerblichen Arbeiten sowie grundsätzliche Verkehrsszenarien von Straßenverkehrsteilnehmern erkannt und verarbeitet werden können, sind Video-, Audio- und Sensordaten notwendig. Weitere Auswertungen können zur Entwicklung und Optimierung von Berechnungsverfahren und Algorithmen für autonome Fahrsysteme dienen.
Zur Entwicklung unserer autonomen Fahrsysteme ist eine Identifikation von Personen, Fahrzeugherstellern, Fahrzeugmodellen, o.ä. nicht notwendig und deshalb sind unsere Systeme dafür nicht ausgelegt. Durch speziell entwickelte Algorithmen werden (Verkehrs-)Objekte in der Fahrzeugumgebung lediglich in Kategorien wie „Gras“, „Bäume“, „Personen“, „Autos“, „Traktoren, … klassifiziert.