Con el proyecto de investigación MARS, AGCO/Fendt desarrolla pequeñas unidades robóticas que se controlan durante la siembra mediante una solución basada en la nube e independientemente de la ubicación. La aplicación MARS permita planificar y controlar la siembra en cualquier momento. El lugar de esparcido de cada grano de siembra se documenta de forma precisa y se almacena en la nube, por lo que los trabajos de mantenimiento ulteriores pueden realizarse de forma precisa y preservando los recursos.
Solución basada en la nube para control mediante robots independientemente de la ubicación
Con el proyecto de investigación MARS, AGCO/Fendt desarrolla pequeñas unidades robóticas que se controlan durante la siembra mediante una solución basada en la nube e independientemente de la ubicación. La aplicación MARS permita planificar y controlar la siembra en cualquier momento. El lugar de esparcido de cada grano de siembra se documenta de forma precisa y se almacena en la nube, por lo que los trabajos de mantenimiento ulteriores pueden realizarse de forma precisa y preservando los recursos.
Proyecto de investigación MARS
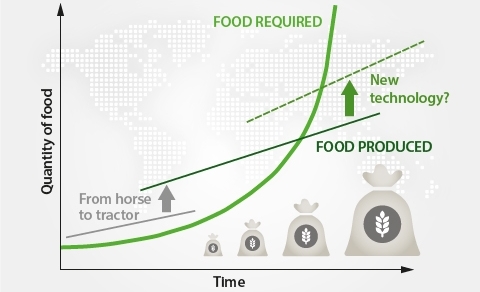
En colaboración con la universidad de Ulm, AGCO/Fendt investiga el uso de robots autónomos en la industria agrícola. En el proyecto de investigación MARS (Mobile Agricultural Robot Swarms), se está investigando la siembra de maíz controlada por satélite a través de robots de campo. Con una unidad de logística, los robots se transportan a su emplazamiento de uso. Desde allí, realizan la siembra de forma automática y altamente precisa y permiten adaptar el modelo y el grosor de las semillas en función de las características específicas de cada superficie, así como documentar de forma exacta cada una de las semillas que se esparcen. Este procedimiento ayuda a realizar un manejo continuo y ahorrativo de los nutrientes y de los productos de protección vegetal, así como a aprovechar el potencial de aumento de beneficios. Gracias a su funcionamiento eléctrico o mediante batería, así como a su peso reducido y al funcionamiento autónomo, la siembra puede realizarse incluso en los casos en los que la agricultura clásica no funciona adecuadamente debido a las condiciones de iluminación o del suelo o como consecuencia de la emisión de ruidos. El acceso al sistema se realiza a través de una aplicación de un dispositivo móvil y, por lo tanto, no depende de la ubicación.
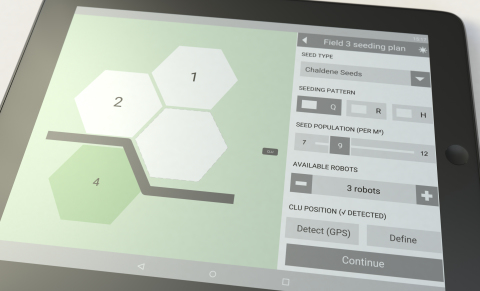
Planificación de la siembra con la aplicación MARS
La aplicación MARS permite realizar una cómoda planificación de la siembra. A través de la interfaz, es posible utilizar los datos existentes para seleccionar el campo deseado, así como la calidad, el modelo y la densidad de las semillas que se desean y el número de robots que deben utilizarse. Un algoritmo inteligente (OptiVisor) planifica el uso de robots a partir de los parámetros especificados y calcula el tiempo necesario para finalizar el encargo. Una vez posicionada la unidad de logística, el uso de los robots puede iniciarse mediante la aplicación móvil. Durante los trabajos, los robots se comunican con la nube, por lo que es posible almacenar las geocoordenadas de cada uno de los puntos en los que se esparcen los granos de siembra. El algoritmo OptiVisor garantiza en todo momento la siembra fiable de los granos de maíz. Así, si se produce un fallo en un robot, el resto de unidades se encargan de inmediato de las funciones que este desempeña. Además, la aplicación también permite realizar un seguimiento en directo del progreso del trabajo. El algoritmo OptiVisor de desarrollo propio supervisa también el estado de carga de las baterías de los robots y garantiza que todas ellas se cargan en la unidad de logística en el momento adecuado. Por su parte, las informaciones almacenadas en la nube sobre la posición de las semillas pueden utilizarse también para resto del proceso de crecimiento, así como para la fertilización y la cosecha y, a continuación, pueden emplearse para labores de análisis y optimización de procesos. El proyecto de investigación está patrocinado por la Unión Europea en el marco del programa FP7 y es parte de Echord++.































































")














